
ARI

ARI is a high-performance robotic platform designed for a wide range of multimodal expressive gestures and behaviours, making it the ideal social robot and suitable for human-robot interaction, perception, cognition and navigation, especially thanks to its touchscreen, gaze control and versatile gestures. With a combination of Intel i7 and NVIDIA Jetson TX2 GPU, you will have enough processing power available for AI development.









GoPiGo3
RaspberryPi-based educational robot, rated 5/5 by the MagPi, the official Raspberry Pi Foundation magazine. The GoPiGo3 offers a full range to support every type of learners. It can be used by beginner coders using Bloxter, intermediate users have a pre-installed JupyterLab, and advanced users can now do ROS.

Husarion Panther
Panther is an autonomous, mobile robot (AMR) platform dedicated for outdoor environment. Compliant with IP54 or IP66 rate of protection. Depending on the use case it can be equipped with a robot arm, LIDAR, RGB-D camera, GPS, UWB and other additional equipment. It can be used in various areas of application such as construction, agriculture, logistics, inspection and many more.
Husarion ROSbot 2 PRO
ROSbot 2 PRO is an autonomous, open source robot platform running on UpBoard single board computer (x64). 4GB of RAM, newest RPLIDAR A3 and awesome looking alloy wheels is what you are looking for in an autonomous robot built for the toughest jobs. ROS and ROS 2 system image options are available.
Husarion ROSbot 2R
ROSbot 2R is an autonomous, open source robot platform based on Raspberry Pi 4 (ARM64). Reinforced with a development platform and free online resources such as set of tutorials, manuals, simulation model and more, it is a great choice for prototyping and learning how to program autonomous vehicles. ROS and ROS 2 system image options are available.
IR-C100

IR-C100 is the last generation of logistics and transportation robots. It uses the last navigation method without any magnetic system.Strip, reflector, QR code, intelligent obstacle avoidance,eliminating the need for traditional AVG.Intelligent, flexible, safe, can be deployed in just half day.The overall cost is lower than similar products.
IR-R300

IR-R300 is the last generation of logistics and transportation robots.It uses the last navigation method without any magnetic system.Strip, reflector, QR code, intelligent obstacle avoidance, eliminating the need for traditional AVG.Intelligent, flexible, safe, can be deployed in just half day.The overall cost is lower than similar products.
Intel Euclid
The Intel® Euclid™ Development Kit features the integration of Intel® RealSense™ depth camera technology, a motion camera, and an Intel® Atom™ x7-Z8700 Quad core CPU to produce a compact and sleek all-in-one computer and depth camera. The Intel® Euclid™ Development Kit is designed to be operable out of the box with pre-installed software including an Ubuntu® operating system.

Jet
Co-developed by NVIDIA and the robotics department at California Polytechnic State University, ‘Jet’ is a smart, autonomous robot based on the NVIDIA Jetson embedded development platform utilizing Servocity Acotobotics components. Jet’s brain is built around the NVIDIA Tegra SoC and uses the same NVIDIA computing cores designed into supercomputers. This gives Jet compute-intensive computer vision, artificial intelligence (AI), and self-driving capabilities in a low-cost package.
LIMO

LIMO is an innovative multi-modal, compact, and customizable mobile robot with Al modules and open-sources packages, which enables education, researchers, enthusiasts to program and develop Al robots easier. The LIMO has four steering modes including Omni-directional steering, tracked steering, Ackermann and four-wheel differential, in line with strong perception sensors and Nvidia Jetson Nano, making it a better platform to develop more indoor and outdoor industrial applications while learning ROS.

LoCoBot
The LoCoBot is a mobile manipulator from Carnegie Mellon University and designed to run Facebook AI's PyRobot. PyRobot is an open source, lightweight, high-level interface on top of the robot operating system (ROS). It provides a consistent set of hardware-independent mid-level APIs to control different robots. PyRobot abstracts away details about low-level controllers and interprocess communication so users can focus on building high-level AI robotics applications.












REEM
REEM, the humanoid service robot created by PAL Robotics, can be used for several purposes. Thanks to its autonomous navigation system, its user-friendly touchscreen, and its voice and face recognition system, REEM can find its way in various surroundings and help or entertain people in most public environments.
REEM-C
REEM-C is the latest commercial humanoid robot of PAL Robotics. REEM-C is an adult size humanoid (165 cm), and it has 44 degrees of freedom, two i7 computers, force/torque and range finders on each feet, stereo camera, 4 microphones, and other devices that make REEM-C one of the best equipped research platforms today.
RH-P12-RN
The RH-P12-RN is 1-DOF two-finger hand. It supports DYNAMIXEL 2.0 protocol via DYNAMIXEL BUS. This hand designed for adaptive gripping, so you can use it for adaptive gripping for various shapes of objects. Also, it supports torque control and current-based position control make it possible to pick up objects of various materials.

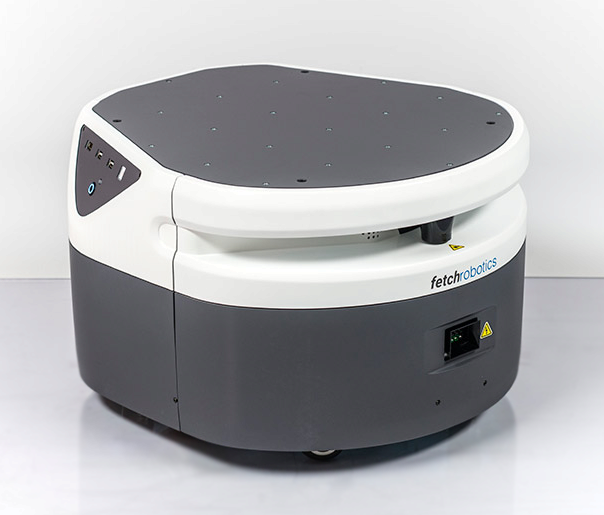
TIAGo Base AI
TIAGo Base AI is the mobile base designed for you. Obtain 3D environment perception and richer data collection with the robot’s wide 245º Field of View (FoV) LiDAR and two RGB-D cameras. Unleash high performance computing and AI research using TIAGo Base AIs NVIDIA Jetson GPU add-on. Move payloads of up to 80kg with excellent balance in indoor environments; including with harsh conditions and wet grounds; thanks to the built-in insulation and improved suspension system. Enjoy the easy-to-use visual programming and advanced navigation suite to collaborate with people and deploy the robot right away.

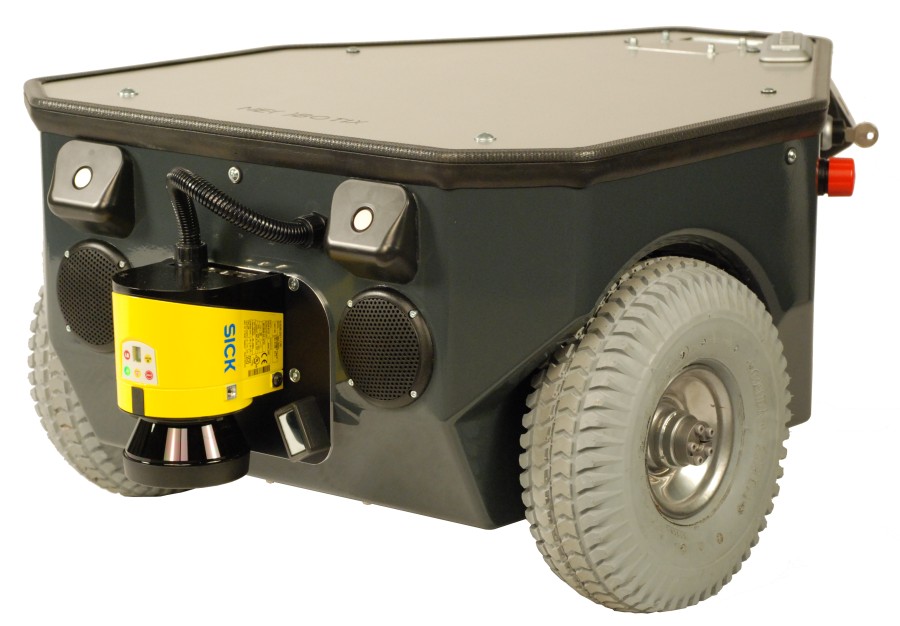
XMachines X100 - UGV Platform for Research
X100 is a UGV platform (Unmanned Ground Vehicle) for mobile robotics research & development. It comes equipped with an array of latest sensors along with a flexibility to add additional sensors and actuators. Its rugged build quality makes it an ideal tool for venturing into Research & Development of Delivery Robots, Space Robotics, Self Driving Cars and various other advanced robotics applications




ctrlX CORE

The industrial control system uses modern 64-bit architecture with fast 4-core CPUs that can be flexibly assigned to control tasks for optimum efficiency. ctrlX CORE has a wide range of interfaces such as 1Gbit Ethernet, USB and a µSD card slot as well as remanent memory for secure data storage as standard. The Edge Controller's field communication is handled via EtherCAT as an automation bus and thus enables easy integration of EtherCAT peripherals. If servicing is required, quick and PC-free hardware replacement can be carried out with the help of a license dongle.











walking
The WALKING robot is an intelligent mobile platform specially developed for the ROS2 robot system. It is not only suitable for scientific and educational learning of the ROS2 robot system, but also for the development and verification of scientific research algorithms in various directions based on ROS2, and also supports quasi-commercial use in some scenarios.

