
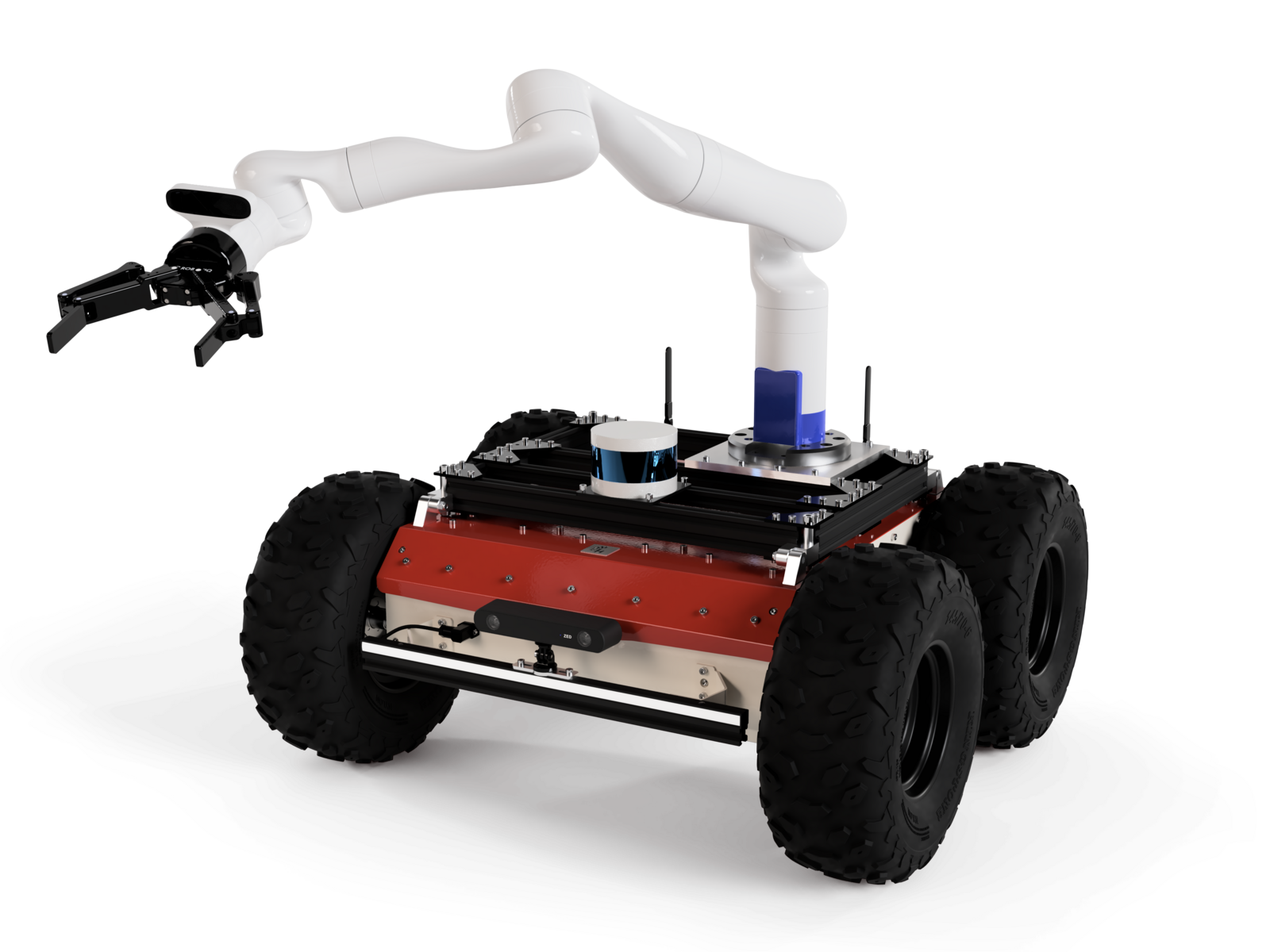
Pather is an autonomous, mobile robot (AMR) platform dedicated for outdoor environment. Compliant with IP54 or IP66 rate of protection. Depending on the use case it can be equipped with a robot arm, LIDAR, RGB-D camera, GPS, UWB and other additional equipment. It can be used in various areas of application such as agriculture, rescue, inspection and many more.

The base platform integrates:
- Low level CPU: Raspberry Pi 4B with Broadcom BCM2711 processor, quad-core Cortex-A72 (ARM v8) 64-bit SoC @ 1.5GHz and 4GB LPDDR4 RAM.
- Router: Teltonika RUTX11 - Dual-band (2.4 GHz/5 GHz), Access Point / Client Mode, 4G LTE CAT 6 dual SIM, Bluetooth 4.0 LE, GNSS (GPS, GLONASS, BeiDou, Galileo and QZSS)
- 4x Brushless Motor with planetary gearbox
- Intertial navigation system: PhidgetSpatial 3/3/3 Basic (3-axis compass, a 3-axis gyroscope, and a 3-axis accelerometer)
- 720 Wh Li-Ion batteries with protection circuits
- Front and rear ligths: Signal lighting made of 44 pcs. APA102C LED chips build into an aluminum profile on the robot’s bumpers
- High profile off-road wheels
- Robust aluminium chassis
- IP54 protection
Available options:
- User computer: Intel NUC10 Performance / Lenovo ThinkStation P360 Tiny
- LIDAR: Slamtec RpLidar S1 / Velodyne / Ouster / LSLIDAR
- RGBD camera: Orbbec Astra / Intel RealSense D435 / Stereolabs ZED 2 / Stereolabs ZED 2i
- Protection rate: IP66
- Battery: 1440 Wh Li-Ion batteries with protection circuits
- Wheels: Mecanum (8”) / Standard + Mecanum set / Small Pneumatic wheels

The official documentation can be found on Husarion Docs webpage