

ROSbot 2R is an autonomous, open source robot platform based on Raspberry Pi 4 (ARM64). Reinforced with a development platform and free online resources such as set of tutorials, manuals, simulation model and more, it is a great choice for prototyping and learning how to program autonomous vehicles. ROS and ROS 2 system image options are available.
It integrates:
- CPU: Broadcom BCM2711 64-bit, Quad-Core ARM Cortex-A72, 1.5 GHz (ARM64, Raspberry Pi 4)
- GPU: Broadcom VideoCore VI
- RAM: 4GB LPDDR4
- IMU: BNO055 (accelerometer + gyro)
- Distance sensor: VL53L0X (time-of-flight)
- Networking: 2.4 GHz and 5 GHz 802.11b/g/n/ac wireless LAN
- 4-wheel mobile platform with DC motors
- Li-on batteries: 3 x 3500 mAh (with protection circuits)
- RGBD Camera: Orbbec Astra
- LIDAR: Slamtec RPLIDAR A2
- Rear panel providing interfaces for additional modules
- Robust aluminium chassis

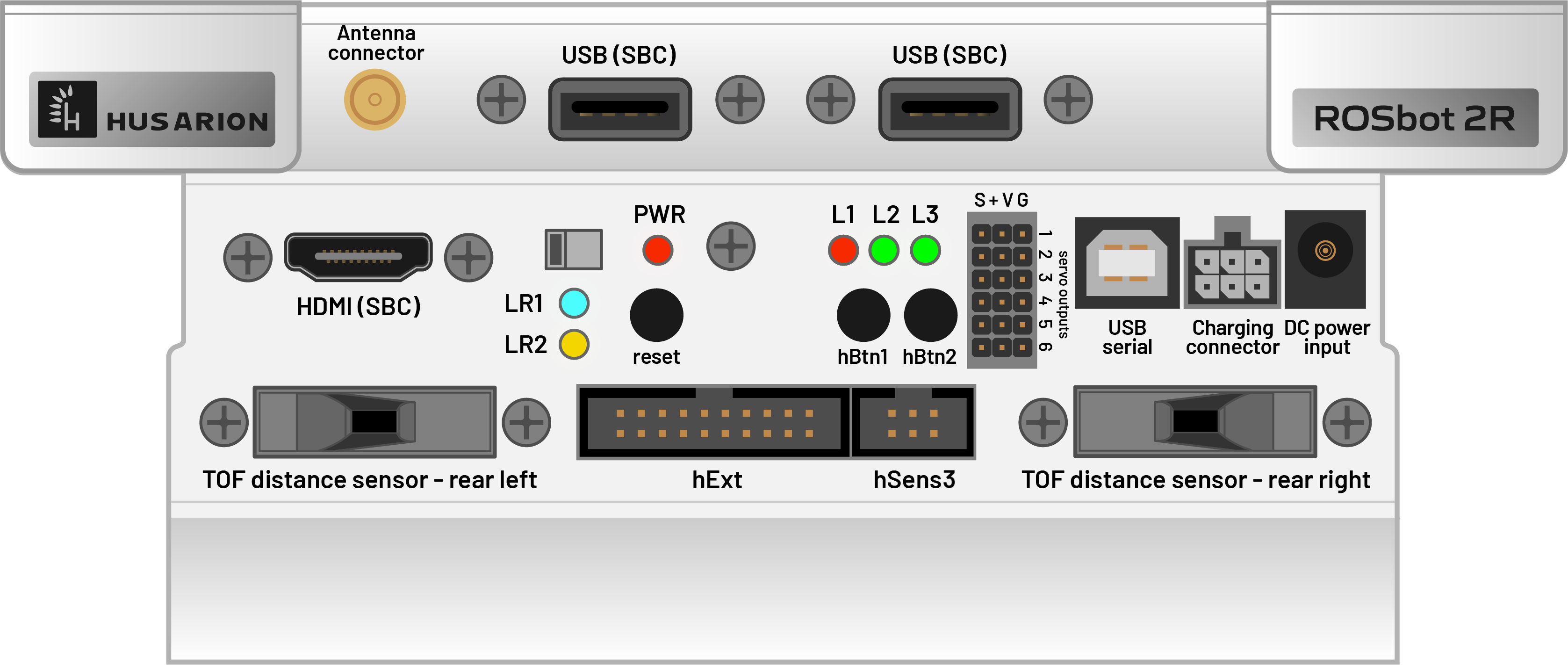
Rear panel:
ROS tutorials dedicated for ROSbot 2R:
- ROS introduction
- Creating nodes
- Simple kinematics for mobile robot
- Visual object recognition
- Running ROS on multiple machines
- SLAM navigation
- Path planning
- Unknown environment exploration
- Map navigation
ROS 2 tutorials dedicated for ROSbot 2R:
- ROS 2 introduction
- Creating nodes - messages
- Creating nodes - services
- Simple kinematics and visualization
- Visual object recognition
The official documentation can be found on Husarion Docs webpage