

End-of-Life notice
Starting from August 31 ROSbot 2 will go end-of-life. As of this date, new features won’t be developed for ROSbot 2 and no support will be provided for this model.
If you require continued support and advanced capabilities, please consider switching to ROSbot 2R or ROSbot 2 PRO.
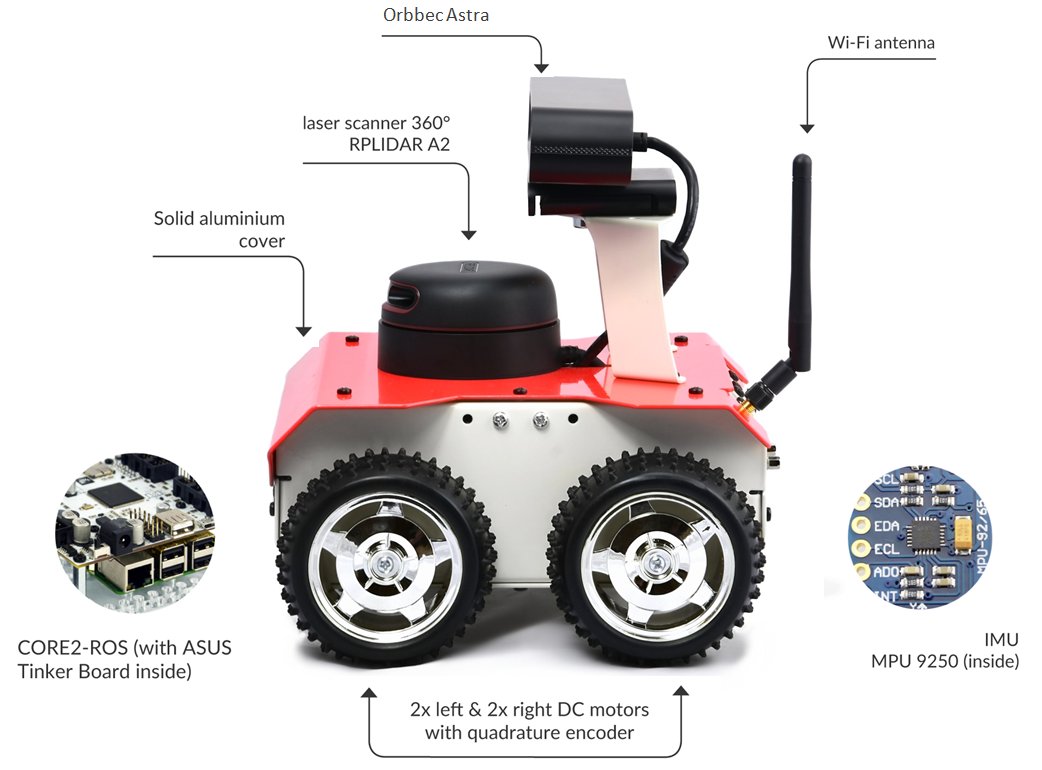
ROSbot 2.0 is a successor of ROSbot - an autonomous, open source robot platform, equipped with an RGBD camera. It can be used as a learning platform for ROS as well as a base for a variety of robotic applications.
It integrates:
- CPU: Rockchip RK3288, Quad-core ARM Cortex-A17 32-bit processor, 1.8 GHz
- GPU: ARM Mali-T764 MP2
- RAM: 2GB LPDDR3
- IMU: MPU 9250 or BNO055 (accelerometer + gyro)
- Distance sensor: VL53L0X (time-of-flight)
- 4-wheel mobile platform with DC motors
- Li-ion batteries: 3 x 3500 mAh (with protection circuits)
- Rear panel providing interfaces for additional modules
- Robust aluminum chassis
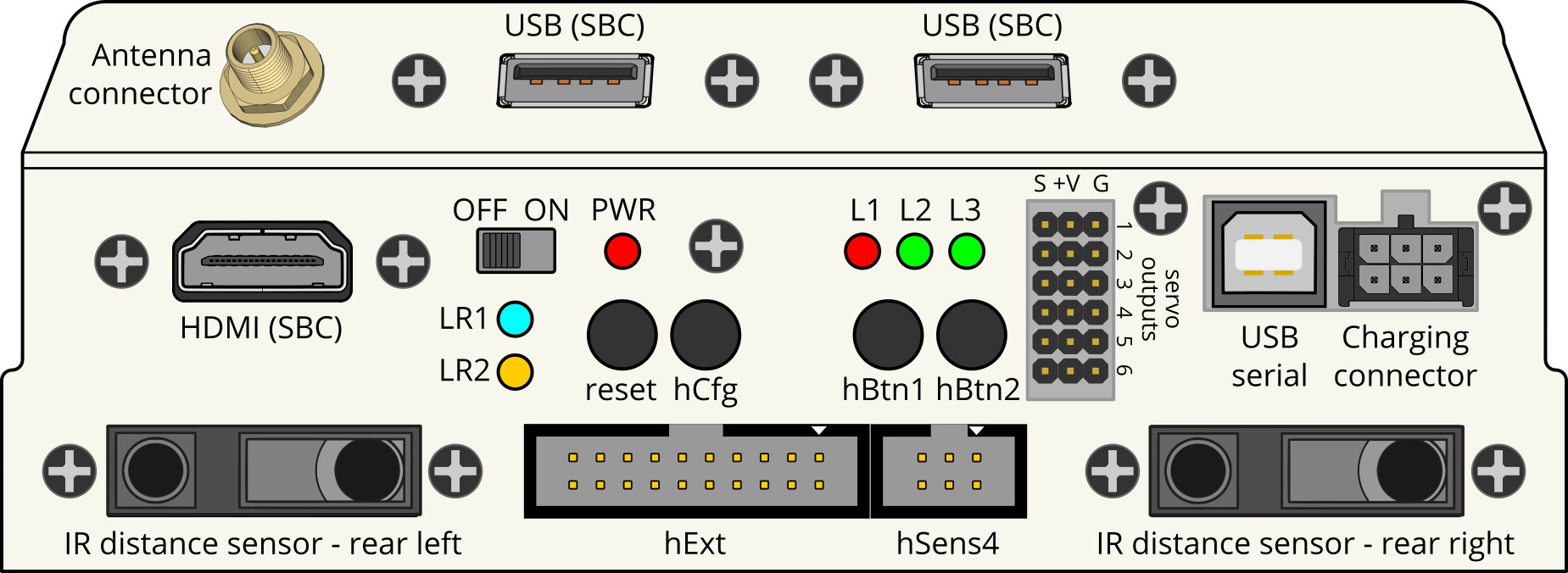
Rear panel:
The official documentation can be found on Husarion Docs webpage