
Mecanumrover Ver.3.0
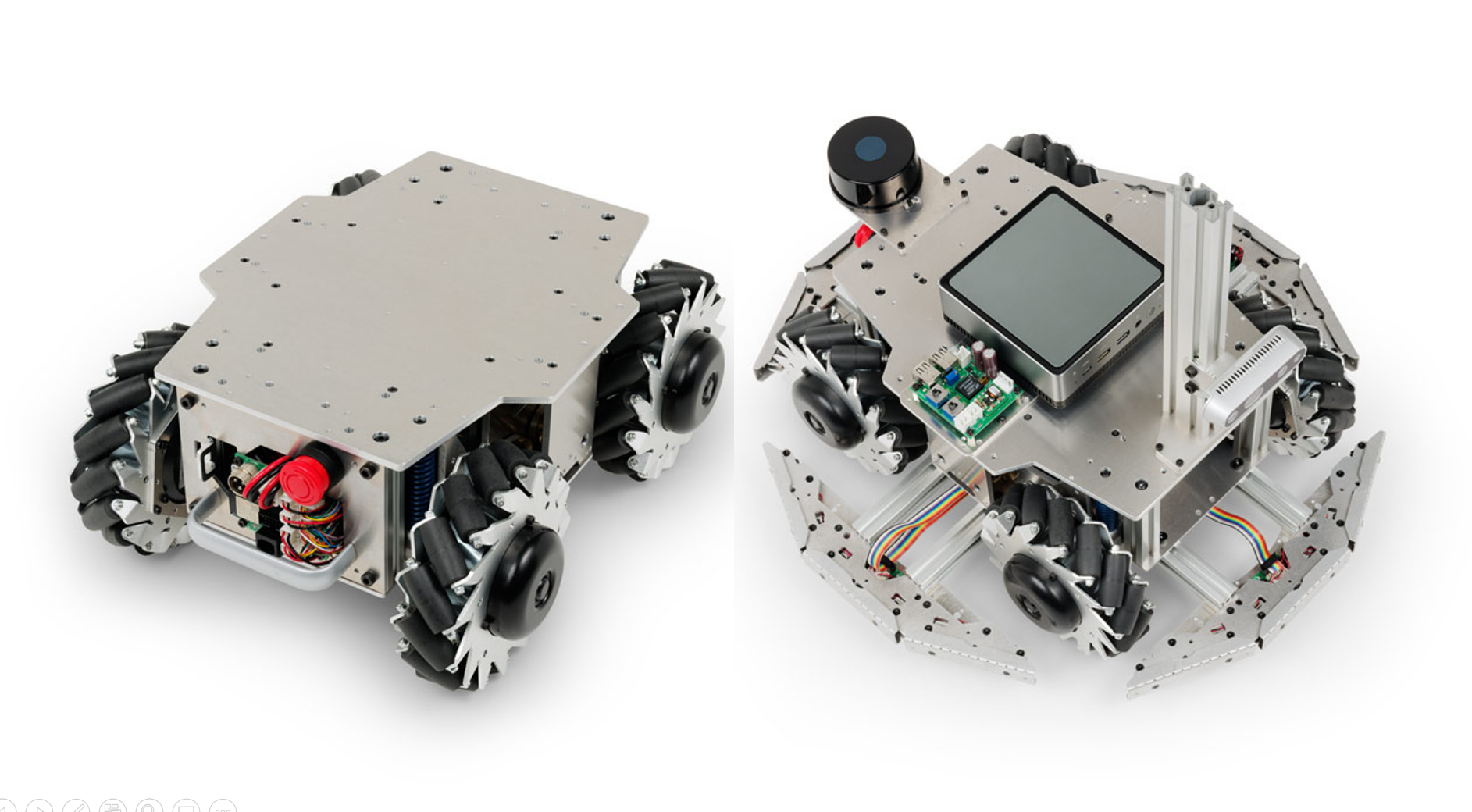
Mecanumrover Ver.3.0 is a four-wheel drive mobile platform with mecanum wheels developed by Vstone Co., Ltd. for researchers. The omnidirectional base provides precision positioning in constrained environments.
Mecanumrover Ver.3.0 inherits most of the features from its predecessor, such as:
- a large payload of 40 kg
- an aluminum housing for easy sensor-mounting and other customization
- Arduino IDE support for effortless software development
- ROS compatible
In addition, it is powered by brushless direct-drive in-wheel motors, which allows noise reduction for up to 20db.
Features
Brushless In-wheel motor Mecanumrover Ver.3.0 uses brushless in-wheel motors, allowing it to reduce the operating noise up to 20db (compared to the previous model).
Mecanumrover Ver.3.0 can transport payload up to 40kg with a max speed of 1.6m/s.
ROS Compatible Mecanumrover Ver.3.0 is able to communicate with ROS via rosserial(Wi-Fi or USB serial). ROS packages with samples are also provided.
ESP32 main board With ESP32 built-in, users can program Mecanumrover Ver.3.0 with Arduino IDE. Users could also control Mecanumrover Ver.3.0 wirelessly, through the integrated Wi-Fi and Bluetooth functionality.
Easily Customizable It supports a wide variety of options, such as LRF, bumpers, wireless charging, ROS PC, depth camera, etc.
For more information, please visit Vstone’s website (Japanese)