

ROSbot 2 PRO is an autonomous, open source robot platform running on UpBoard single board computer (x64). 4GB of RAM, newest RPLIDAR A3 and awesome looking alloy wheels is what you are looking for in an autonomous robot built for the toughest jobs. ROS and ROS 2 system image options are available.
It integrates:
- CPU: Intel Atom x5 Z8350, Quad-core 64-bit processor, 1.92 GHz (UpBoard)
- GPU: Intel HD 400 Graphics
- RAM: 4GB DDR3L
- RGBD camera: Orbbec Astra
- LIDAR: Slamtec RPLIDAR A3 laser scanner
- IMU: BNO055 (accelerometer + gyro)
- Distance sensor: VL53L0X (time-of-flight)
- 4-wheel mobile platform with DC motors
- Li-on batteries: 3 x 3500 mAh (with protection circuits)
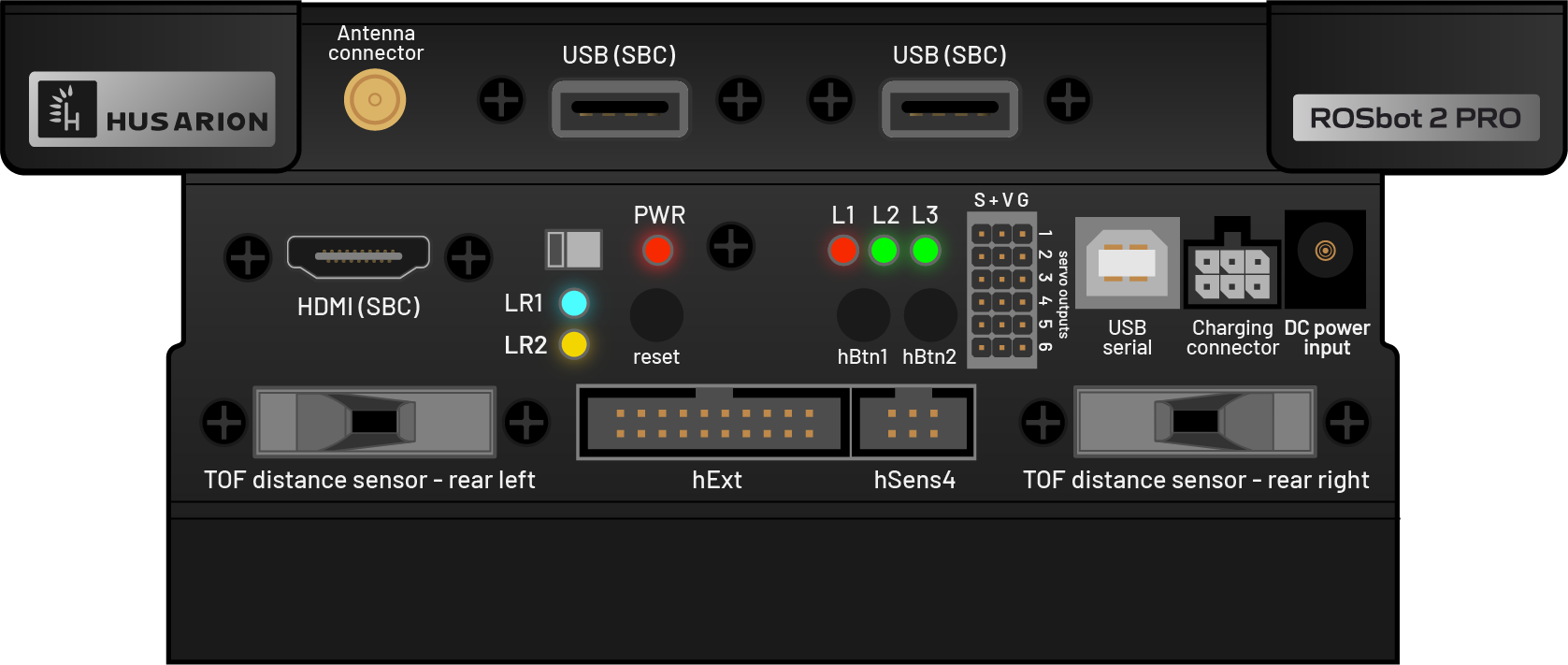
- Rear panel providing interfaces for additional modules
- High profile alloy wheels
- Robust aluminium chassis


The rear panel allows to connect additional devices (eg. sensors or servos). USB and HDMI ports are useful for the software development.
ROS tutorials dedicated for ROSbot 2.0 PRO:
- ROS introduction
- Creating nodes
- Simple kinematics for mobile robot
- Visual object recognition
- Running ROS on multiple machines
- SLAM navigation
- Path planning
- Unknown environment exploration
- Map navigation
ROS 2 tutorials dedicated for ROSbot 2.0 PRO:
- ROS 2 introduction
- Creating nodes - messages
- Creating nodes - services
- Simple kinematics and visualization
- Visual object recognition
The official documentation can be found on Husarion Docs webpage