
The easiest way to program and customize your own robot
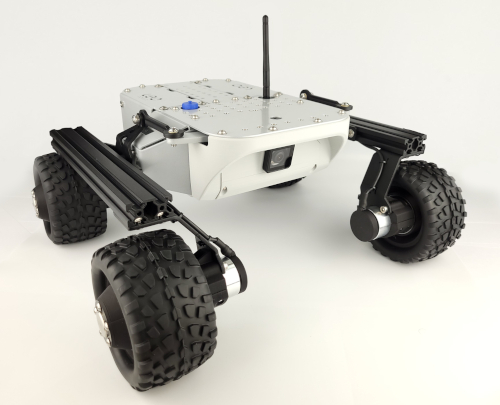
Leo Rover is a compact, mobile robot that consists of a rectangular platform mounted on a 4-wheel drive chassis.
Thanks to its reliable, watertight design, this plug-and-play robot is capable of adapting to the most difficult terrains. Leo Rover runs on ROS Noetic Ninjammys (there’s also experimental ROS 2 software available) with Raspberry Pi 4 as the main computer.
Its open-source reversible software enables you to go deep into the core and gives you the opportunity to freely try new ideas. The robot’s designed to be customized as you see fit – with a wide array of different modules you can think of to attach to it, you’re the one who decides what kind of task the rover is to perform.
Features:
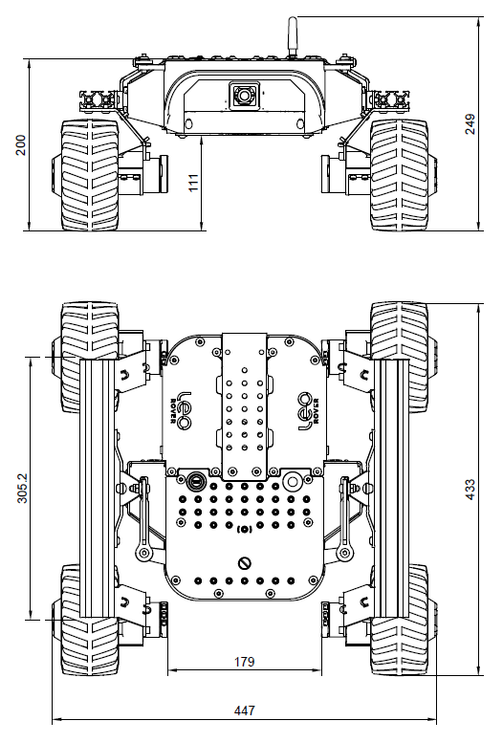
Dimensions:
The Leo Rover robotic platform is available either pre-assembled or as a developer kit (to be assembled on your own).
Need help?
Ask us anything! The Leo Rover team is always there for you whenever you need our help. Whether you have some questions or need guidance, feel free to reach us at contact@fictionlab.pl