
Overview
Navio2 is an autopliot shield that is used with the Raspberry Pi board. This autopilot is not only designed as a platform for a Linux version of Ardupilot but also as a platform for your custom robotic projects. The Navio2 eliminates any need to have multiple controllers onboard as everything is packed into one (with the Raspberry Pi), thus increasing the robustness of your project and facilitating the development. With the Navio2, you can control all kinds of moving robots such as cars, boats, multirotors and planes. The Navio2 is also equipped with double IMU and a GPS/Glonass/Beidou receiver for accurate positioning and orientation.
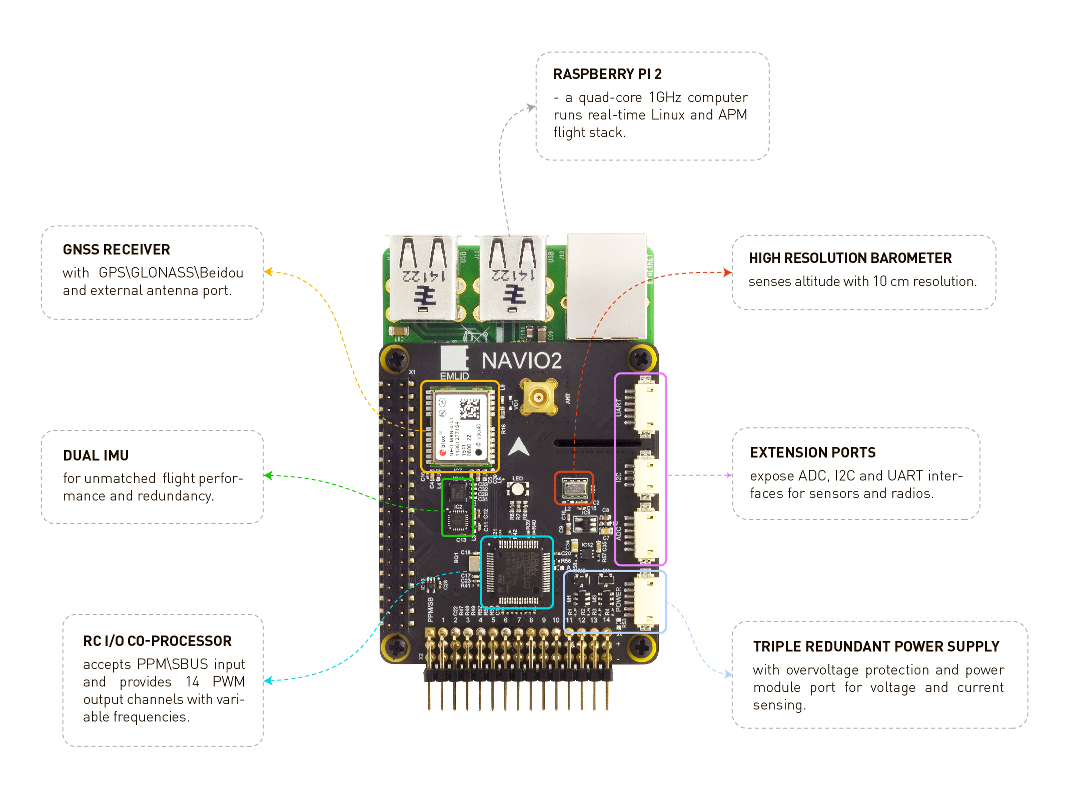
Navio2 is more than a ready to fly autopilot – it was built for research and education and has proven itself in universities and research institutions worldwide. Just think of the numerous projects that involve IMU, GPS, barometer, servo control and a user-friendly programming environment. Open-source drivers and detailed tutorials are available both in C++ and Python. All experimental data can be processed directly on Raspberry Pi.
ROS with mavros is now supported straight out of the box within Emlid Raspbian firmware for Raspberry Pi.