
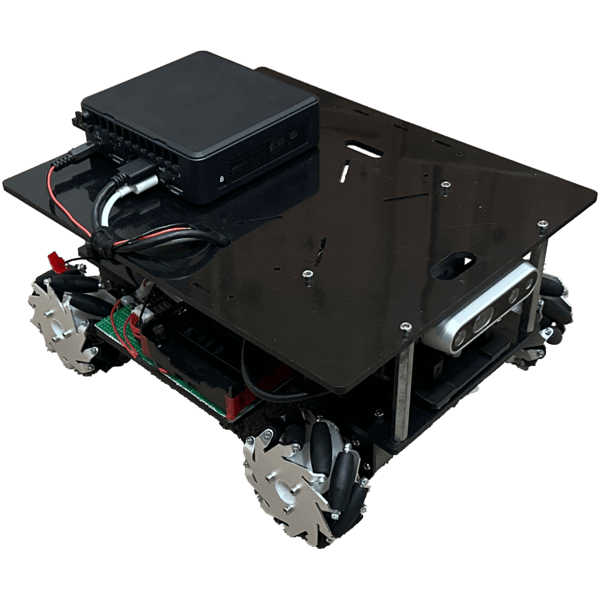
LGDXRobot2 is a DIY Mecanum wheel chassis designed for building ROS2 robots using low-cost hardware. It offers complete freedom to customise hardware specifications and aims to inspire your enthusiasm on robotics.
Fully Open-Source Robot
LGDXRobot2 provides open-source designs for the chassis body, controller board circuit, and software source code. All components are created using open-source tools, ensuring that your build is never restricted by licensing or paywalls.
Flexible Chassis Design
LGDXRobot2 allows full freedom to customise hardware specifications, including chassis size, Mecanum wheels, and onboard computer. The flexible firmware is designed to adapt to a variety of hardware configurations, making prototyping and experimentation effortless.
Comprehensive Software Support
LGDXRobot2 includes a graphical interface for hardware testing and fine-tuning motor PID settings, helping you build a high-performance robot with ease.
It is fully integrated within the ROS2 ecosystem, providing example projects for both physical and simulated environments. A responsive web interface also allows convenient access to ROS2 GUI tools directly from your browser.
Cloud Connectivity
LGDXRobot2 integrates seamlessly with LGDXRobot Cloud, enabling remote monitoring and management of your robot through a web-based interface.
Get Started
LGDXRobot2 is distributed across several Git repositories. The project is released under the MIT Licence, except ChassisTuner, which is released under GPLv3.